A.R.M - Assitive Robotic Manipulator
Overview
The goal of this project was to use an Adroit Robotic Arm as a teleoperated robotic helper. A Thalmic Labs Myo Armband was used as the controller for the Adroit arm. The armband would go around the user's forearm and read the muscle activity in the form of EMG signals. These signals were then passed through a gesture classification machine learning model which would map the inputted EMG signals to a specified gesture, such as a fist. These gestures were used to control the end effector of the Adroit. To make the user have more control of the Adroit's movements, the gyroscope measurements from the IMU of the armband were used to control the position of other Adroit joints. This combination of EMG and IMU inputs gives almost full control of the Adroit arm, and it allowed for the completion of simple tasks with relative ease for the user.
Here is a video showcasing the basic functionality of the system, including the completion of some more difficult tasks. The video labels the sections that are sped up.Gesture Recognition Machine Learning Model
The machine learning model used for this project was developed by Robert Schloen using PyTorch, so I will link to his project page here for more details.
The model was trained on data from the Ninapro Database 5, which collected thousands of EMG samples using the Myo Armbands. The dataset contains data for many different gestures,
including flexion of each finger, different wrist movements, and different grasps. I ultimately chose to use gestures corresponding to the flexion of the five fingers and a closed fist. This was primarily
because the model was not as accurate when trying to classify different grasp and wrists. For better prediction of gestures, I had to collect a lot of my own data to then use transfer learning with the trained model. More
about that can be found on Robert's project page. Below is a video showing the real time classification of these gestures using the Myo Armband in a Python ROS node.
Here is a video of using these gestures with the Adroit. While I trained 7 gestures, I really only ever use 5: Rest or Open Hand, Fist, Pinky, Ring and Middle. As the video shows, I map the
"Fist" gesture to be a small end effector grip and the "Pinky" to be a larger grasp, "Ring" is used as a recallibration flag, and "Middle" was used to extend a joint not on the gripper.
IMU Control using the Myo
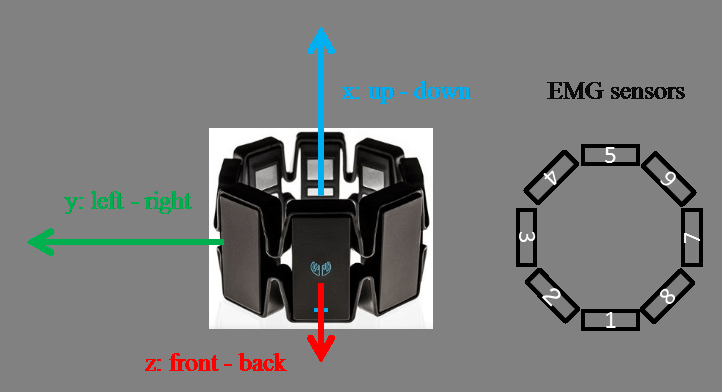
The Myo Armband comes equipped with a nine degreee of freedom IMU. I chose to use the gyroscope data to control the position of certain Adroit joints. Below is a photo of the Adroit with
the labeled joints that were used, as well as a schematic of the Myo. To control Joint 1, I use the gyroscope data of the z-axis, to control Joint 3, I use the y-axis, and to control Joint 4 I use the x-axis. This
corresponds to the gyroscope changes that occur when the Myo is on the forearm. Those joints on the Adroit were chosen as I thought they resembled the natural movement of the human shoulder, elbow, and wrist the best.

Trying to control position of joints using gyroscope proved difficult since
the gyroscope measurements began to drift over time, and because the orientation of the Myo would change slighly as it was on the forearm. This was the main
reason to add the recallibration gesture, which stops all control to the Adroit and allows the user to simply realign themselves with the arm and continue
using it. The video below showcases general control of the Adroit using the IMU as well as the recallibration functionality.
System Pipeline and ROS Interface
The Myo operates via bluetooth to the computer and streams both IMU and EMG signals collected from the forearm. The raw EMG and IMU data is fed into ROS nodes which handle the real time gesture classification
and IMU stream for interfacing with the Adroit.
The Adroit was controlled using ROS 1 Noetic from within a Docker container.
The Adroit already had the capabilty of being controlled via an Xbox controller using
nodes from previously built packages. To control it with the Myo, I mapped the Xbox buttons and joystick commands to certain Myo gestures or IMU measurements. For example,
moving the left joystick to the left would send a command to Joint 1 to move, and so I made it such that the gyroscope readings in the z-axis would act as the left joystick control
for left and right movements. Below is a schematic of the system pipeline and ROS nodes.
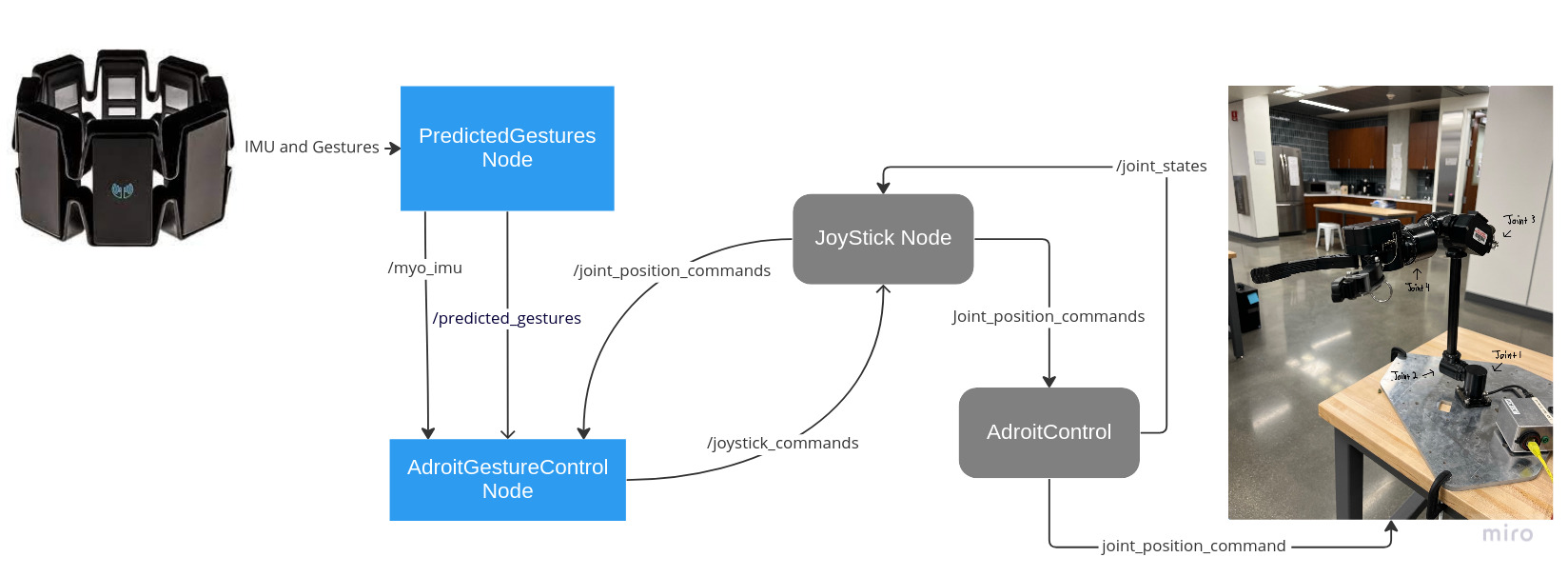 The blue nodes are the new ones I created corresponding to
gesture prediction and IMU control, while the grey are the nodes from previous Adroit packages that lay the foundation for interfacing and controlling the Adroit with an Xbox controller. The Adroit gesture control
node would take in all Myo data, meaning a predicted gesture and IMU stream. It would then act as a game controller by publishing joystick commands to the estabilished joystick node. The joystick node and the main Adroit
control node would then send joint commands to the Adroit and recieve back information on the joint positions.
The blue nodes are the new ones I created corresponding to
gesture prediction and IMU control, while the grey are the nodes from previous Adroit packages that lay the foundation for interfacing and controlling the Adroit with an Xbox controller. The Adroit gesture control
node would take in all Myo data, meaning a predicted gesture and IMU stream. It would then act as a game controller by publishing joystick commands to the estabilished joystick node. The joystick node and the main Adroit
control node would then send joint commands to the Adroit and recieve back information on the joint positions.
Future Considerations
While this project was successful in allowing for the control of the Adroit, the IMU control required the recallibration gesture due to its eventual inaccuracy. The pose estimation
problem that comes with trying to use IMUs to detect the position of an object, in this case the Myo on the forearm, could definitely be looked into more in order to make the control
more robust.
It might also be interesting to incorporate different ML models for gesture control, and possiblly different gestures that correspond to grips and grasps as initially intended.